AMR開発を現実に!移動ロボット用コントローラーという技術選択

搬送自動化の加速と課題
製造・物流現場では、人手不足や多品種少量生産への対応を背景に、搬送工程の自動化が加速しています。その中で注目されているのが、自律走行型搬送ロボット AMR (Autonomous Mobile Robot) です。
しかし、現場からは「AMRを開発したいが、開発工数や技術的ハードルが高い」という声も少なくありません。そこで今回は、開発スピードと柔軟なカスタムを両立することが可能な製品をご紹介します。
目次
- 1.AMR(自律走行搬送ロボット)とは?
- 2.AMR開発における「工数」の壁
- 3.KCONBOT製“汎用コントローラー”がもたらす価値
- 4.導入・開発手法の比較
- 5.まとめ
1. AMR(自律走行搬送ロボット)とは?
AMRはセンサーと地図データを使って自由にルートを判断し、自律的に走行する次世代の搬送ロボットです。
従来のAGV(無人搬送車)と比較して、磁気テープや誘導線に沿って走行するのに対し、センサーと地図データを使って自由にルートを判断するという点で大きく進化しています。それでは、AMRの特長を見ていきましょう。
【AMRの主な特長】
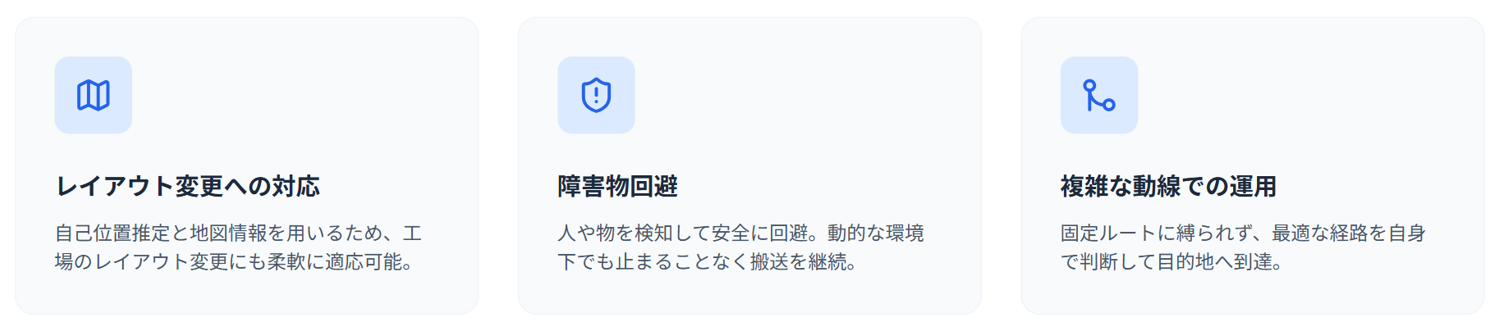
このように、AMRは自己位置推定と地図情報を用いて柔軟に経路を判断できるため、現場の変化に強いという大きな特長があります。
2. AMR開発における「工数」の壁
多くの魅力を持つAMRですが、内製化においては開発工数がかかるとされています。 これは、以下のような複数の技術要素を統合する必要があるためです。
- ハードウェア統合:LiDAR、IMU、カメラ等のセンサー類
- ソフトウェア実装:SLAM(自己位置推定)、ナビゲーション、走行制御
- 外部連携:各種機器のI/O制御、上位システムとの連携
これらをすべて自社オリジナルとして開発すると、設計・実装・検証の各フェーズで工数が膨らみ、PoC段階で開発が止まってしまうケースも珍しくありません。AMR内製を成功させるためには、「どこを作り、どこを作らないか」 の見極めが重要になります。
3.KCONBOT製“移動ロボット用汎用コントローラー” がもたらす価値
弊社が取り扱うKCONBOT製移動ロボット用コントローラーは、AMRや無人搬送車(AGV)の開発を強力に支援する製品です。

移動ロボット用コントローラー1台で、無人搬送車に必要な各種機器・センサーを統合制御できるため、 システム構成をシンプルに保ちながら、開発スピードを大幅に向上させます。 また、メーカー自社開発のソフトウェアにより、マップ生成,SLAMによる自己位置推定, 走行指示・ナビゲーション制御といった制御機能を実現します。
|
特長 |
内容 |
|
オールインワン統合制御 |
コントローラー1台で各種機器・センサーを統合制御。複雑な配線やシステム構成をシンプル化します |
|
メーカー自社開発ソフト |
高精度なマップ生成、SLAMによる自己位置推定、スムーズな走行指示・ナビゲーション制御を標準搭載 |
|
内製ノウハウの蓄積 |
ブラックボックス化を防ぎつつ、自社の目的に合わせたカスタマイズが可能。社内に技術を蓄積できます |
4. 導入・開発手法の比較
では、フルカスタムや既製AMRを購入した場合とどのような違いが生まれるのか。下記比較資料をご覧ください。/p>
|
項目 |
フルカスタム |
既製AMRを導入 |
KCONBOT製品を活用した開発 |
|
初期開発工数 |
非常に大きい |
ほぼ不要 |
小〜中(大幅削減) |
|
導入までの期間 |
長い(数か月〜1年以上) |
短い |
短い(PoC〜本番がスムーズ) |
|
カスタマイズ性 |
高い |
低い |
高い |
|
技術習得の必要性 |
非常に高い(SLAM・制御・ROS等) |
低い |
低い |
|
レイアウト変更対応 |
開発次第 |
制限あり |
柔軟に対応可能 |
|
拡張性(将来対応) |
高い(負荷大) |
限定的 |
高い |
|
安全性・信頼性 |
自社責任で担保 |
メーカー保証 |
豊富な実績、安全認証も取得 |
|
トータルコスト |
高い |
初期費用高 |
削減可能 |
|
内製ノウハウ蓄積 |
◎ |
× |
◎ |
~比較から見える KCONBOT製移動ロボット用コントローラーの強み~
フルカスタムは自由度が高い一方で、開発工数や技術的ハードルが高く、リスクも大きくなりがちです。一方、既製AMRは導入が容易ですが、トラブル時の対応や将来的な拡張に制約が残るケースも少なくありません。その中間に位置するのが、移動ロボット用コントローラーを活用したAMR開発です。
自社の目的に合わせた様々なカスタマイズが可能なため、開発工数を削減しつつ、内製ノウハウを蓄積でき現場に最適なAMRを構築できるというバランスの取れたアプローチを実現します。
5.まとめ
当社では、AMRの開発を円滑に進めるためには、すべてをゼロから作るのではなく、KCONBOT製コントローラーのような汎用コントローラーを使用し、自社の強みを活かした部分に注力する。これが、開発をスムーズ進めるためのポイントになると考えています。移動ロボットの導入や見直し,新規開発をご検討の際には、ぜひ本製品をご活用ください。

モノづくりに関わる皆様へ、取り扱いメーカー情報はもとより、電子部品・電気部品・制御機器・設備機械などに関わるノウハウや情報をお届けいたします。